

Industry Now
HOME PAGE >
NEWS CENTER >
Unmanned military systems need high precision systems
Industry Now
Release time: 2017-06-16 Author: EEWORLD
The modern unmanned military system has become an indispensable part of the armed forces around the world. The defense industry has been developing this kind of system continuously to enable it to play the role of large-scale attack, surveillance and operation support. The unmanned operation system is probably the most dynamic field in the defense industry today. The annual expenditure of the world is more than 5 billion 500 million dollars. By 2024, it is expected that this figure will be close to 10 billion [1]..
Unmanned aircraft field of surprising side, system type is extremely rich, from some weighs less than 20 grams of fine nano unmanned aircraft (Nano UAV, NUAV UAV) to the medium, such as a mass of 450 kg, 150 kg payload capacity of rye (Watchkeeper), until the harvest MQ-9 take-off weight of more than 5000 kg the (MQ-9 Reaper) (formerly known as predator B (Predator B)), large span, the variety is as the acme of perfection.观止。
The size, weight and power (Size, Weight and Power, SWaP) are the key factors to consider when the UAV is large or small in the balance of its performance and mission duration. There are a large number of electronic systems that can be used, but in this article, the concerns of the electronic system will fall in the following aspects:
Air operation safety and independent operation:
Sensor and data processing
Communication and information security
power supply system
Introduction of early unmanned operation system
The origin of modern UAV can be traced back to more than 100 years ago. However, people may regard the radio controlled drone aircraft used as air target strike practice in 1930s as the most famous UAV originator. More than 400 aircraft were built in England. At that time, the name "queen bee" was known. The aircraft requires that the flight is always in the line of sight of the pilot of a remote controlled aircraft. But it wasn't long before people began to try their own flight beyond the range of sight. In 1940, Edward Sorensen (Edward M. Sorensen) for his invention of the ground station to apply for a patent, in this invention, use frequency modulation technique to control the aircraft and flight information beyond visual range back. The reason for this patent is that people realized that an automatic failure prevention mode was needed to keep the plane flying at the same time, and establish a backup control system at the same time.
With the development of wartime weapon payload and subsequent development in 1950s and 1960s, the complexity of the unmanned military system has also increased. In early 1960s Ryan (Ryan) unmanned aircraft using the basic guidance system, the system consists of a programmable timer, gyrocompass and altimeter, determines the departure flight altitude, heading and flight time, the aircraft also provides a parachute assisted landing and reverse function. Although these are fairly basic functions, the strategic significance of obtaining images with film cameras and the advantages of semi autonomous systems are easy to see. Therefore, people want to work together to further develop them.
Air flight safety and autonomous operation
Obviously, the flight safety problem is very important, people have carried out extensive debate on this issue, to determine how to control the sky, in order to make the existence of UAV will not affect the safety of the existing air traffic at the same time, the military and civilian UAV application development is not restricted.
Small UAV flying in the range of sight depends on the pilot of remote control to determine whether there will be a collision. However, a larger UAV running autonomously or semi autonomously needs to detect and evade the system in order to avoid air collision. People are developing various sensors for example, such as modifying traditional aircraft transponder, visual and infrared camera, Light Detection and Ranging (LiDAR) system and conventional radar system. From these data into the sensor system can reflect the environment of the picture, then make their own flight decisions, this requires a very complex software and hardware resources, but also to share civil airspace UAV, also need to meet the requirements of the agreement under the premise of existing operation. When flying in friendly airspace, the use of ground radar and traffic drawing resources to reduce the complexity of the airborne system and expand the scope of monitoring may be an option, but when using this way, we should make trade-off between data link reliability and delay.
The ASTREA plan shows that the technology of autonomous detection and avoidance can be adopted, but this technology is adopted on Jetstream aircraft, which does not have the power, size and weight limitation of UAV. Adjusting this technology to make it available for most UAV is a great challenge, but using advanced field programmable gate array (FPGA), digital signal processing (DSP) and high-performance analog electronic devices, this technology can be miniaturized. It is not a simple task to supply such electronic system. FPGA needs strict power accuracy and low voltage and high current. This requires careful design of power supply chain to minimize power consumption and reduce heat. One way is to use digital power system management (PSM) technology. This technology can reduce power consumption by dynamically regulating voltage and frequency, thereby helping to extend the mission life of small UAV. PSM also improves reliability and provides remote and monitoring functions, as well as energy use records and the "black box" fault recording function.
Figure 1: digital power system management
Sensor and data processing
Even the smallest and manually launched NUAV can carry multiple cameras and cameras to complete surveillance tasks, while many versions of MQ-9 harvesters can meet various needs of hunting and surveillance. The version of carrying weapons may contain cameras, infrared night vision cameras, synthetic aperture radar (SAR) used for clouds or smog, and laser rangefinder and target lighting system for guided munitions. A version of the bait and jamming function has also been developed. At the same time, the tactical data link system can directly send target information and image data to the manned aircraft. More development is expected in the field of signal and intelligence (SIGINT). With the progress of signal and intelligence system, the longer version will provide more than 40 hours of mission duration. Due to the rapid increase of airborne sensors and prolong the life time of the task and produced a large amount of data, these data must be compressed and stored or through real-time data link transmission, which will inevitably lead to some aspects of the compromise, such as bandwidth, quality and possible loss of image data.
Adding a new payload capacity will increase the burden of the power system. Fortunately, the development of the power level of printed circuit board solutions has also made progress in recent years, the power density has been significantly improved, the Module Linear Technology Corporation (micro regulator module) solution is a kind of technology progress. Each small module has a complete high efficiency power supply, and its shape is suitable for a very strict size application and is very reliable. Figure 2 shows an example.
Figure 2 LTM4644 µModule voltage regulator
Communication and information security
The communication link of UAV can be divided into two parts:
The flight control data link is used for remote command (uplink) and telemetry (downlink) information to monitor UAV when UAV responds to operator instructions or performs autonomously in accordance with GPS coordinates. Generally speaking, the 56kbps link using the spread spectrum technology can meet the needs of the flight control data link, and the uplink can be protected by 128 bit encryption algorithm and forward error correction.
The communication link that transmits payload sensor information is regarded as a separate communication link. HD video may require up to 10Mbps bandwidth, and run COFDM, MPEG-4 or similar modulation scheme. Such as the reaper and other large UAV will generally use a dedicated satellite leased trunk line combination (Ku band) and ground (C band) communication lines, with ample space for large antennas, and other types of UAV may be in the industrial, scientific and medical (ISM) band operation, such as 2.4GHz (WLAN) and 5.8GHz band.
With the integration of the air traffic control system and protocol is another obstacle to fully autonomous operation of UAV, because UAV needs to respond to voice commands, provide heading and flight level information, and confirmed by the VHF radio channel and synthetic speech, confirm the order has been accepted.
Information security risks include deliberate or accidental interference; counterfeit or interception commands and control signals; communication channels attenuate. In the regular manned flight, in order to avoid any very close flying objects, the pilot can immediately control the aircraft. Obviously, when using UAV, pilots always rely on the communication link and the stable operation of airborne sensors.
The risk can always be mitigated. Even very small and UAV flying according to a set of GPS coordinates can also raise the flight height to restore the lost GPS signal, and automatically return to the base station when the time limit for the arrival of the port is reached. As a contingency measure, the fraud prevention GPS system combined with GPS receiver and inertial measurement unit can be used for statistical analysis of the received GPS signals, which helps to determine whether anyone tries to cheat the system.
Of course, all these communication systems need power, and sensitive radio receivers need some very low noise power sources, so that radio sensitivity will not be reduced due to power supply. The new chip technology and novel IC design methods have resulted in the emergence of a series of innovative products, these products can not only provide hitherto unknown high efficiency, and low noise, such as LT8640 Silent Switcher and LT3042 ultra low noise, high PSRR RF linear regulator.
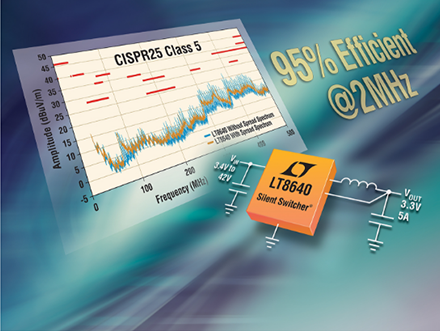
Figure 3:LT8640 Silent Switcher a pressurizer
power supply system
This article has emphasized before that some IC level power technology supports the continuous change of UAV and sensor payload. However, the selection of airborne power source is also the core factor that affects the overall performance. As people increasingly focus on developing UAV with lower cost, smaller size and lighter weight, the attractiveness of internal combustion power source is decreasing. Fuel cell technology is a possible choice, especially for tasks with long service life and low average power demand.
Puma (Puma) series small UAV is testing a fuel cell, the flight time from 150 minutes (when using LiSO2 battery) to extend to nearly 5 hours, the entire fuel cell system weighs about 2 kilograms, and the power to weight ratio is about 1kW/ kg.
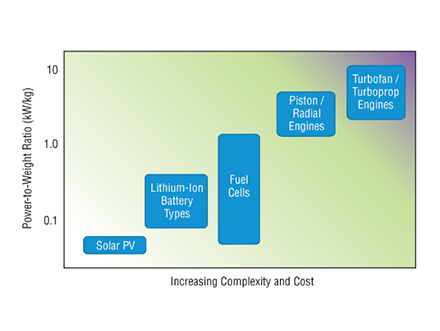
Figure 4:UAV power and weight ratio of a power source
Power-to-Weight Ratio:Ratio of power to weight
Solar PV:Solar photovoltaic cells
Lithium-Ion Battery Types:Lithium ion type battery
Fuel Cells:fuel cell
Piston/Radial Engines:Piston / radial engine
Turbofan/Turboprop Engines:Turbofan / turboprop engine
Increasing Complexity and Cost:Complexity and cost are increasing
The location of fuel cell is between the battery and the internal combustion engine, and has the advantage of environmental protection, but it does face some problems of fuel handling and storage. However, it can overcome these problems by storing granular hydrogen in the replaceable fuel box.
Small UAV and NUAV are most likely to continue to use lithium ion batteries, depending on the configuration, which can make NUAV fly about 30 minutes with a single cell. Longer service life and larger models will require multi cell design. This design can benefit from battery capacity balancing technology implemented by LTC3300 and IC. This technology can maximize the operation time of the system. UAV with high flying height and acting as a pseudorandom satellite, such as Google and other companies, is developing and will be used to provide UAV for Internet services. Solar power can also be used to replace batteries. Such systems need to operate reliably in the environment that may cause single event upset due to enhanced radiation. Therefore, the complexity will increase, and the characteristics of the IC used may be specified, and these IC will be specially tested.
conclusion
Nowadays, the unmanned operation system plays an indispensable role in the armed forces. A large number of funds provided by the army promote the rapid development of such systems. The focus of development is concentrated on the smaller and lower price UAV system.
As the payload of sensors and the electronic system of UAV platform become more and more complex, the efficiency of power supply chain and airborne power source is crucial for providing enough high performance. New IC power solutions are helping to achieve SWaP goals.
UAV and long endurance missions with high flying height are pushing forward the demand for new power sources, such as solar energy and fuel cell, and the use of new power means new IC.
The last one: Using intelligent simulation module for design
The next one: In the end